Thanks @robski. I tried the latest 2.3.1 , the oldest 2.0.3 and more.
I just tried again,
Now it works with 2.0.3
and up to 2.2.6
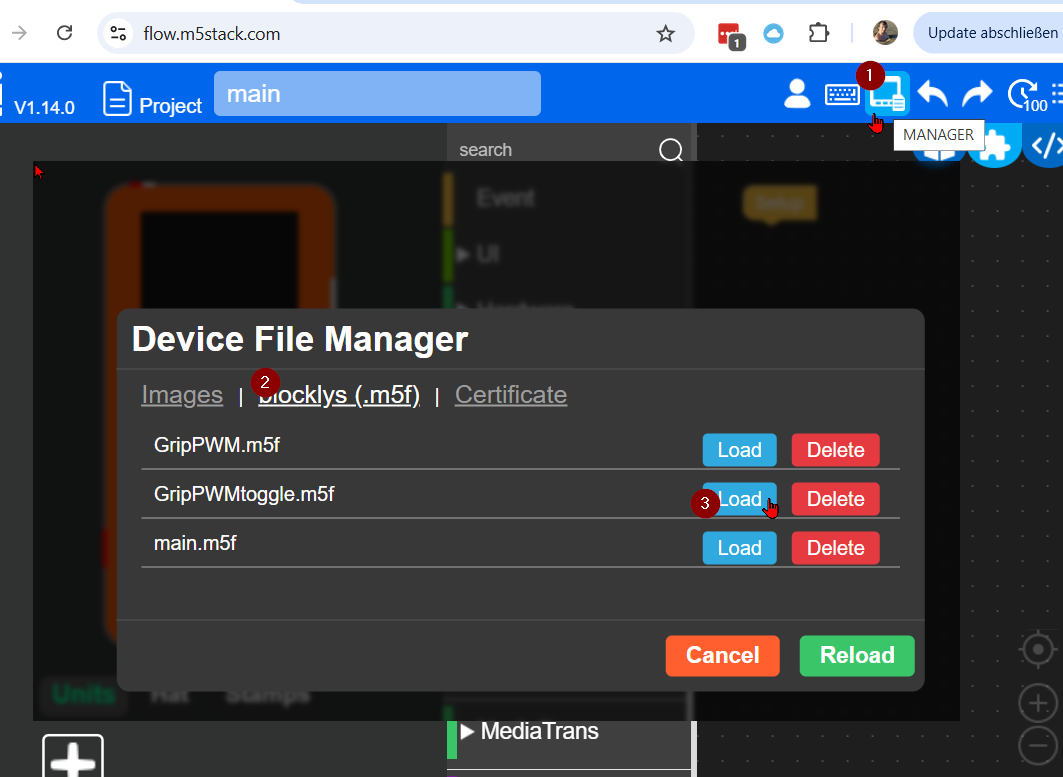
2.2.7 and newer ones i get this weird black screen with some elements showing up when pressing buttons, as in the screenshot above.
in some cases, i could not burn a lower version until i used the erase option before burning.
EDIT:
now i realized with 2.2.7 and up to 2.3.1 although the screen is black on bootup, it connects to the cloud and i can send programs to it.
So, form 2.2.7 on just the UI broken.