Bug? uiFlow 1.4.5 Stick C IMU ypr[] (getX and getY) values are weird.
-
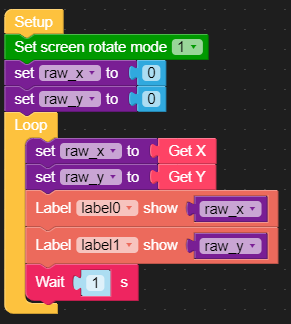
I tried to get the roll, pitch, and yaw (ypr[]) of Stick-C IMU using uiFlow 1.4.5 (and 1.4.5.1) but the values seemed weird. X( ypr[1]) and Y (ypr[2]) are decreasing from time to time until the variables getting overflowed. I have checked my IMU using C++ (Ardunio IDE) and all were OK.
-
-
from m5stack import * from m5ui import * from uiflow import * lcd.setRotation(1) import imu import hat setScreenColor(0x111111) hat_bugc0 = hat.get(hat.BUGC) imu0 = imu.IMU() label0 = M5TextBox(34, 10, "Text", lcd.FONT_Default,0xFFFFFF, rotate=0) label1 = M5TextBox(35, 33, "Text", lcd.FONT_Default,0xFFFFFF, rotate=0) label2 = M5TextBox(10, 10, "X", lcd.FONT_Default,0xFFFFFF, rotate=0) label3 = M5TextBox(9, 34, "Y", lcd.FONT_Default,0xFFFFFF, rotate=0) raw_x = None raw_y = None raw_x = 0 raw_y = 0 while True: raw_x = imu0.ypr[1] raw_y = imu0.ypr[2] label0.setText(str(raw_x)) label1.setText(str(raw_y)) wait(1) wait_ms(2) -
@liemph thank you feedback . you could delete wait block to solve it. our engineer will fix it later .
-
Hi, the problem is still there. Removing the wait block kinda of fix it but reading are inconsistent. Any fix?
Thanks
-
@ipodlux For the time being, I stopped using uiFlow (or Python) for IMU related project. It is not reliable and it is slow. Use Arduino IDE, you will have a much faster code and reliable result.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login