WHAT? Really?!
Then thats my problem! I cant find this information in the docs. It make no sense, if i can connect a external 12V Batterie…
WHAT? Really?!
Then thats my problem! I cant find this information in the docs. It make no sense, if i can connect a external 12V Batterie…
Hi @teastain
128 reverse the direction from forward to backward
I have a issue with GoPlus2 and a RC Motor.
If i use the motor on a raspberry with L298N Motor driver the speed ist very fast.
On M5Stack core with GoPlus2 and Full Speed 100 (+127) the motor runs 1/3 of the speed from the L298N. What's the issue in M5 GoPlus2 ? Why the motor is too slow ?
If i connect on the GoPlus2 a external battery with 7.4V it makes no difference.
Has anyone a idea, how i can drive faster my dc motor with the GoPlus2 Modul ? It looks like the issue is "not" on motor or power voltage side. Must be on GoPlus2.
It is possible to connect a L298N Motor driver on M5Stack core ?
Has anyone a pin layout schema to connect pins if it is possible ?
The question was for uiflow. Not micropython…
Same for me. Since the rfid reader connected, the internal Speaker make PIEP every time.
I use M5Stack core, with the M5 rfid reader.
With this noise, the complete environment make non-sense...
Hi Felix,
no problem. Will try to find the error...
Thanks for your help!!
Hi Felix,
Vielen dank für Deine Unterstützung ! Sprichst du deutsch ?
Thanks for your help. I will try both options, and will send a feedback here.
Hello,
i have a M5Core device.
Yes, i switch from TX23 -> to TX17, and RX19 -> to 16. Thanks for this tip.
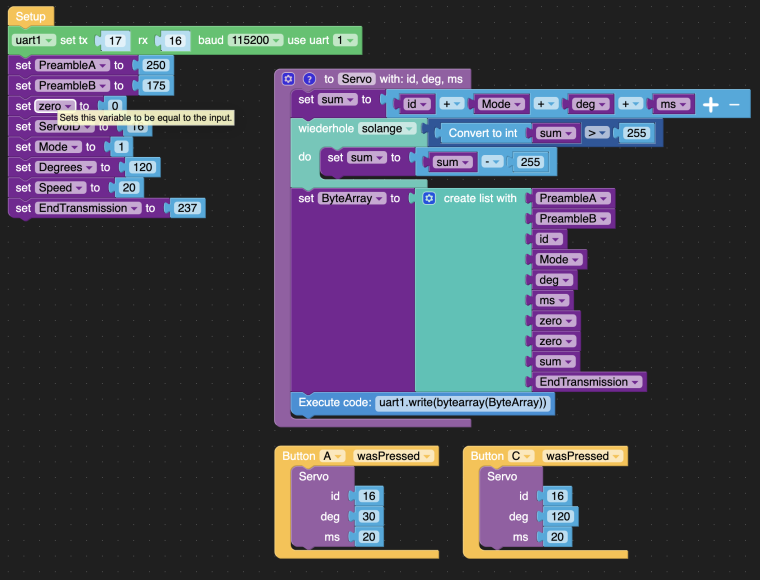
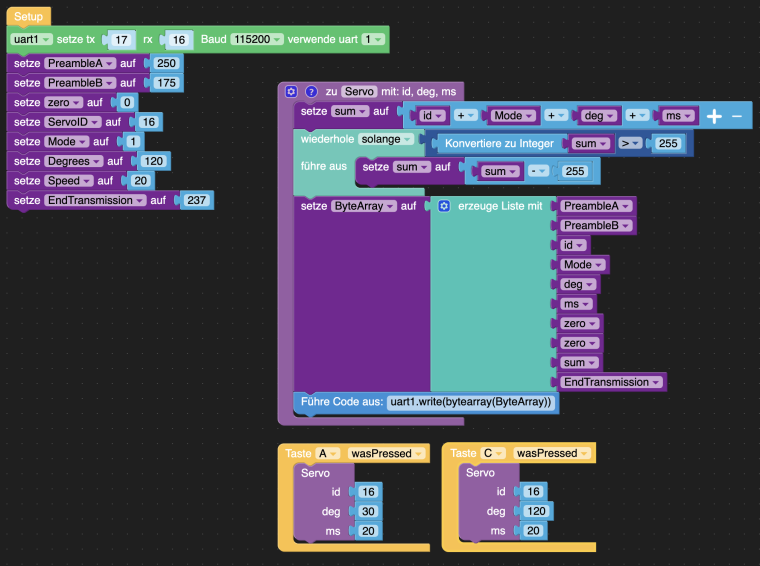
But, now i have a last question, see screenshot below.
I Arduino i write with Serial2.write(...) the Hex. How can i do this in the UIFLOW ?!
Please see screenshots...
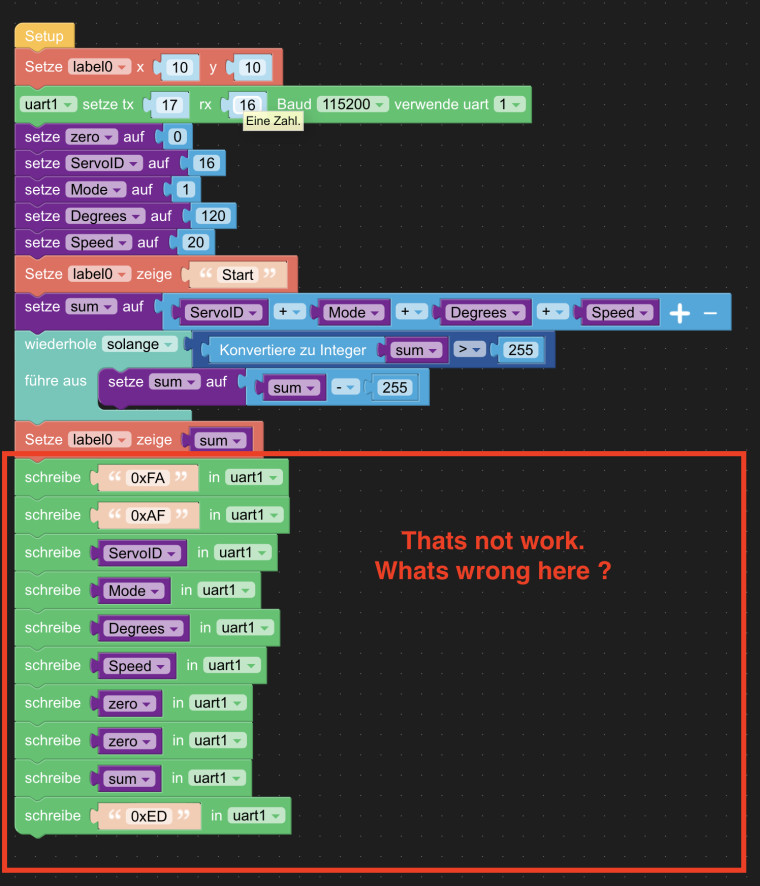
Hope you can help me, with my last question...
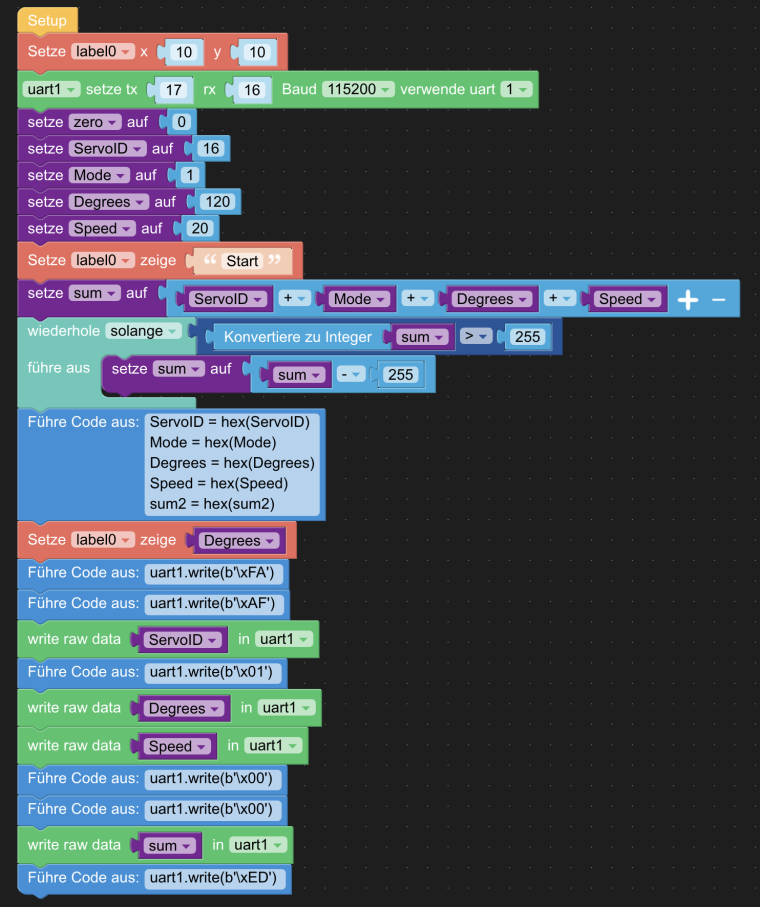
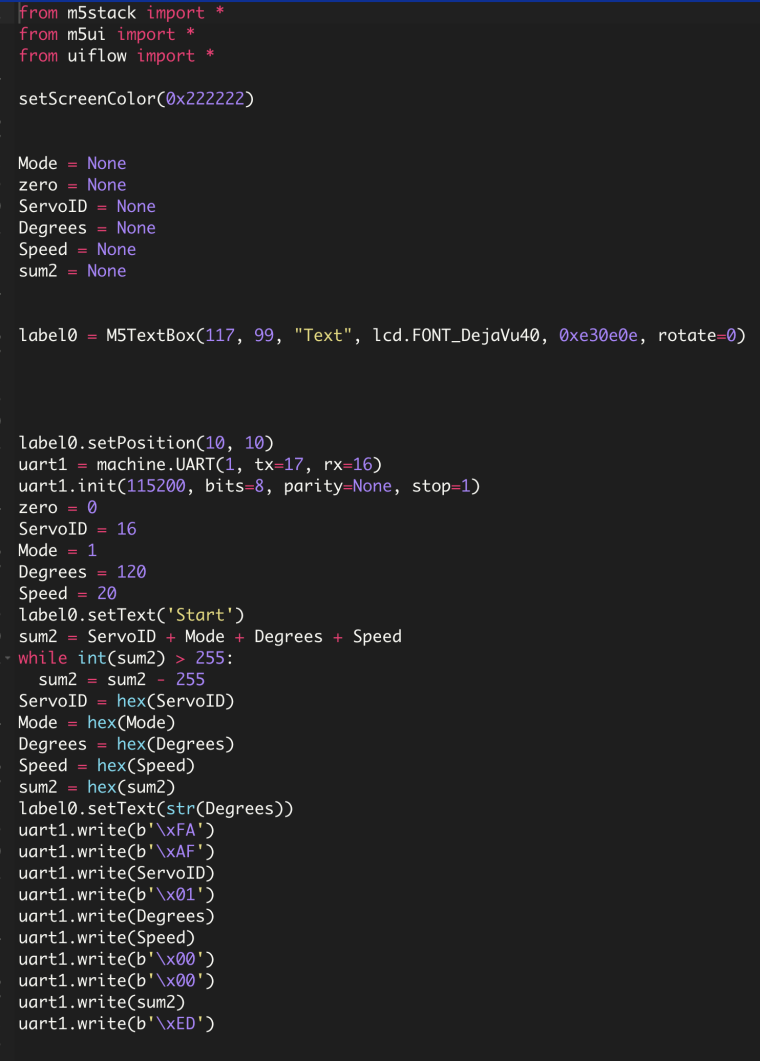
Thats not work. The code hang on the line set UART...
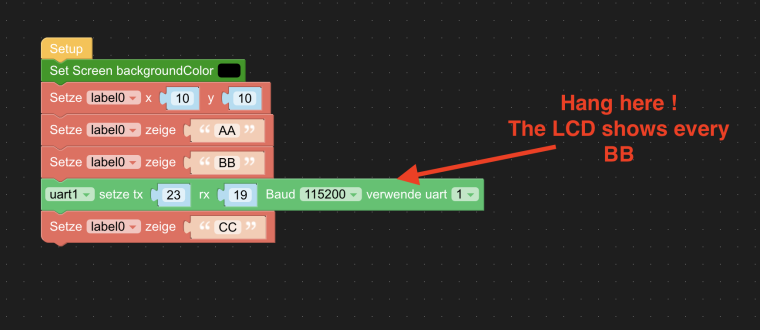
Whats wrong ??
Hi Gents,
i have a Problem with my Servo module. I buy the M5Core 12 channel Servo modul, and connect my servo on Port 0 from the Modul, but the Servo not work.
I have a running example for the Arduino, which works well with the Servo. I think the problem is my logic to move the code from Arduino Uno to M5Core 12 Channel Servo modul.
That is working with Arduino Uno:
#include <SoftwareSerial.h>
SoftwareSerial mySerial(10, 11); // RX, TX
void setup()
{
Serial.begin(9600);
mySerial.begin(115200);
Serial.println("start");
}
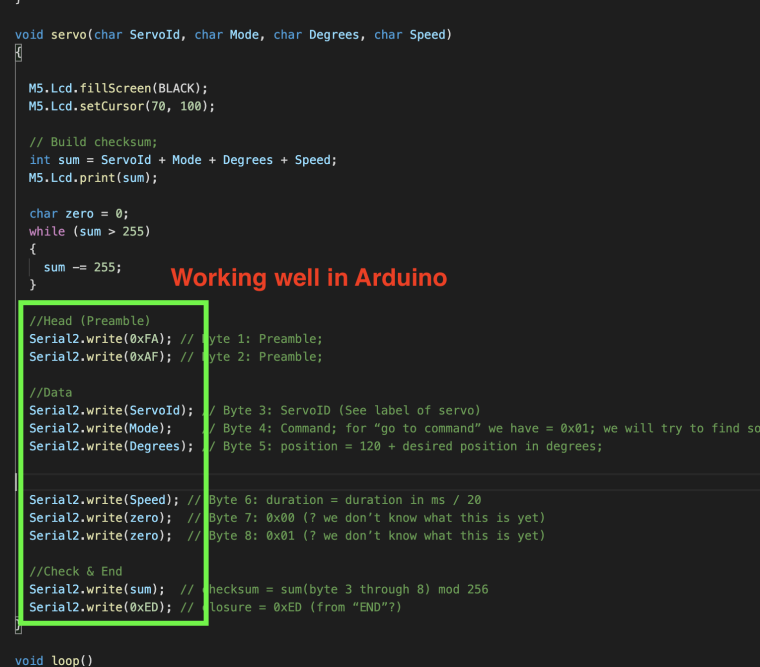
void servo(char ServoId, char Mode, char Degrees, char Speed)
{
// Build checksum;
int sum = ServoId + Mode + Degrees + Speed;
char zero = 0;
while (sum > 255)
{
sum -= 255;
}
//Head (Preamble)
mySerial.write(0xFA); // Byte 1: Preamble;
mySerial.write(0xAF); // Byte 2: Preamble;
//Data
mySerial.write(ServoId); // Byte 3: ServoID (See label of servo)
mySerial.write(Mode); // Byte 4: Command; for “go to command” we have = 0x01; we will try to find some other commands shortly
mySerial.write(Degrees); // Byte 5: position = 120 + desired position in degrees;
mySerial.write(Speed); // Byte 6: duration = duration in ms / 20
mySerial.write(zero); // Byte 7: 0x00 (? we don’t know what this is yet)
mySerial.write(zero); // Byte 8: 0x01 (? we don’t know what this is yet)
//Check & End
mySerial.write(sum); // checksum = sum(byte 3 through 8) mod 256
mySerial.write(0xED); // closure = 0xED (from “END”?)
}
void loop()
{
servo(16, 1, 45, 40);
delay(2000);
servo(16, 1, 0, 10);
delay(2000);
}
And here i try move my code to M5Stack with 12 channel Servo Modul, which are not work on Port 0. Have any a idea ?
#include <Arduino.h>
#include <M5Stack.h>
#include <Wire.h>
#define SERVO_ADDR 0x53
void setup()
{
M5.begin(true, false, true);
M5.Power.begin();
M5.Lcd.setTextFont(4);
M5.Lcd.setCursor(70, 100);
M5.Lcd.print("Servo Example");
Wire.begin(21, 22, 115200);
}
void servo(char ServoId, char Mode, char Degrees, char Speed)
{
Wire.beginTransmission(SERVO_ADDR);
Wire.write(0x00);
// Build checksum;
int sum = ServoId + Mode + Degrees + Speed;
char zero = 0;
while (sum > 255)
{
sum -= 255;
}
//Head (Preamble)
Wire.write(0xFA); // Byte 1: Preamble;
Wire.write(0xAF); // Byte 2: Preamble;
Wire.write(ServoId); // Byte 3: ServoID (See label of servo)
Wire.write(Mode); // Byte 4: Command; for “go to command” we have = 0x01; we will try to find some other commands shortly
Wire.write(Degrees); // Byte 5: position = 120 + desired position in degrees;
Wire.write(Speed); // Byte 6: duration = duration in ms / 20
Wire.write(zero); // Byte 7: 0x00 (? we don’t know what this is yet)
Wire.write(zero); // Byte 8: 0x01 (? we don’t know what this is yet)
Wire.write(sum); // checksum = sum(byte 3 through 8) mod 256
Wire.write(0xED); // closure = 0xED (from “END”?)
Wire.endTransmission();
}
void loop()
{
servo(16, 1, 45, 40);
delay(2000);
servo(16, 1, 0, 10);
delay(2000);
}
Can anyone help me, please... ?
Same here. The M5 Docs are a nightmare!!
On every documentation, the syntax is wrong, and not work correctly!
😒
Hi Guys,
ihm new with M5Stack. I have a MCore2 and try compile this in visual code with plattform.io.
How i must use the code in Plattform.io ? If i compile the code, the device showing black screen.
Can anyone help me ?