@tuupola thanks for your response! is there a particular magnetometer you recommend using with the m5 platform?
S
Offline
Posts
-
RE: M5Stick IMU Yaw Readings Off
-
M5Stick IMU Yaw Readings Off
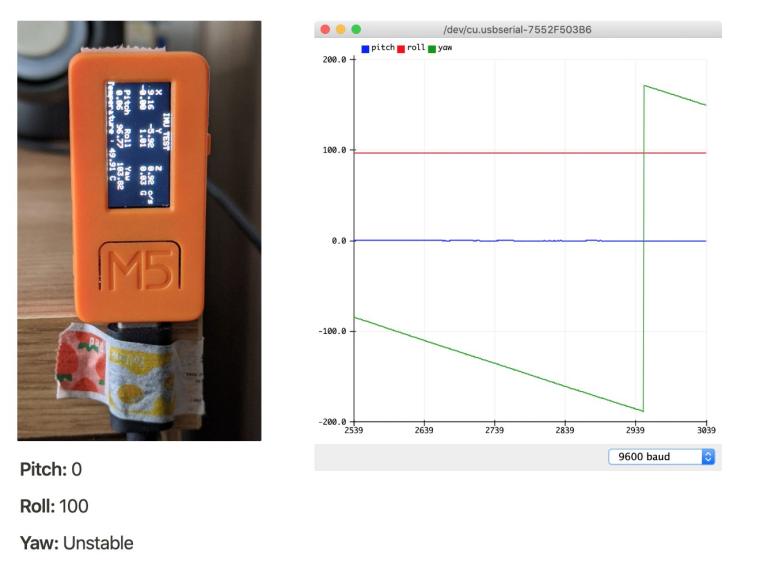
I did some calibration with my M5stick to see what the IMU pitch, yaw, and roll readings would be based on the example IMU Arduino app included with the M5stick library.
It seems like the Yaw values seem to always be drifting – is this a known issue, or is there a way to account for it?
My code:
#include <M5StickC.h> float accX = 0.0F; float accY = 0.0F; float accZ = 0.0F; float gyroX = 0.0F; float gyroY = 0.0F; float gyroZ = 0.0F; float pitch = 0.0F; float roll = 0.0F; float yaw = 0.0F; void setup() { // put your setup code here, to run once: M5.begin(); M5.IMU.Init(); M5.Lcd.setRotation(1); M5.Lcd.fillScreen(BLACK); M5.Lcd.setTextSize(1); M5.Lcd.setCursor(40, 0); M5.Lcd.println("IMU TEST"); M5.Lcd.setCursor(0, 10); M5.Lcd.println(" X Y Z"); M5.Lcd.setCursor(0, 50); M5.Lcd.println(" Pitch Roll Yaw"); Serial.begin(9600); } float temp = 0; /***************************************** M5.IMU.getGyroData(&gyroX,&gyroY,&gyroZ); M5.IMU.getAccelData(&accX,&accY,&accZ); M5.IMU.getAhrsData(&pitch,&roll,&yaw); M5.IMU.getTempData(&temp); *****************************************/ void loop() { // put your main code here, to run repeatedly: M5.IMU.getGyroData(&gyroX,&gyroY,&gyroZ); M5.IMU.getAccelData(&accX,&accY,&accZ); M5.IMU.getAhrsData(&pitch,&roll,&yaw); M5.IMU.getTempData(&temp); M5.Lcd.setCursor(0, 20); M5.Lcd.printf("%6.2f %6.2f %6.2f ", gyroX, gyroY, gyroZ); M5.Lcd.setCursor(140, 20); M5.Lcd.print("o/s"); M5.Lcd.setCursor(0, 30); M5.Lcd.printf(" %5.2f %5.2f %5.2f ", accX, accY, accZ); M5.Lcd.setCursor(140, 30); M5.Lcd.print("G"); M5.Lcd.setCursor(0, 60); M5.Lcd.printf(" %5.2f %5.2f %5.2f ", pitch, roll, yaw); M5.Lcd.setCursor(0, 70); M5.Lcd.printf("Temperature : %.2f C", temp); // Plotting Serial.print("pitch:"); Serial.print(pitch); Serial.print(","); Serial.print("roll:"); Serial.print(roll); Serial.print(","); Serial.print("yaw:"); Serial.println(yaw); delay(100); }Full documentation on the various IMU readings when the device is in different orientations here: https://www.notion.so/scientiffic/M5Stick-IMU-Calibration-dbb5e3fa4d35444da7ca7decb418ed20
-
m5stick No Module Named 'Hat'
I have an m5StickC with a speaker hat. I tried uploading a basic program from the UI Flow Desktop app to my m5Stick:
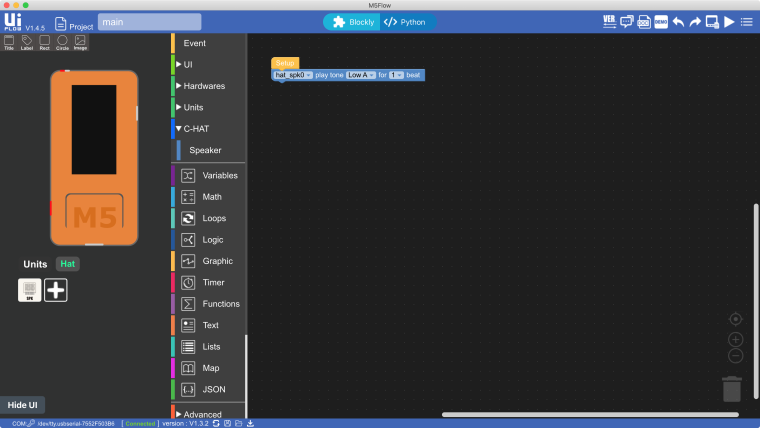
But the m5Stick is display the error 'no module named hat'

How can I get the m5stick to recognize the speaker hat code from UI Flow?
-
Easy Loader Sync Error
As per the instructions available on the main m5stack Github repo, I tried using the EasyLoader app to flash my M5stick.
However, when trying to burn my M5Stick back to factory settings, I continually get the error
Sync Failed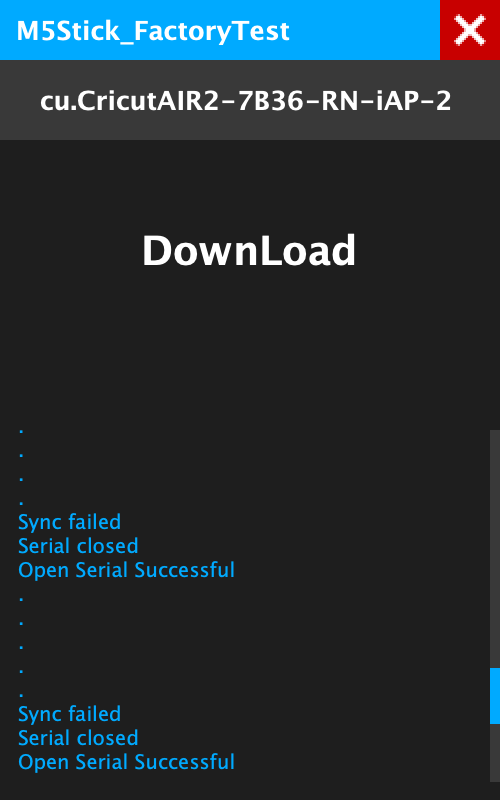
How can I resolve this error?
-
Quick Start Guide Images are Broken
I'd like to follow your Quick Start guide for the m5Stick, but it appears all the image links are broken:

Note that this is the case for all tutorials at this link: https://github.com/m5stack/m5-docs/tree/master/docs/en/quick_start
-
Converting Hex color to uint_16
I'm trying to use the fillScreen() method for the LCD, which expects a color in uint_16.
I'm currently fetching the color as a a HEX via a GET request to a service, which is returning a String value such as "#ff0000"
I need to convert the string value from the GET request into a uint_16 so that I can set the color.
uint16_t color = (uint16_t) strtol(http.getString(), NULL, 16);Which gives me the error
cannot convert 'String' to 'const char*' for argument '1' to 'long int strtol(const char*, char**, int)'Any recommended way to generate the uint_16 color from a HEX string?