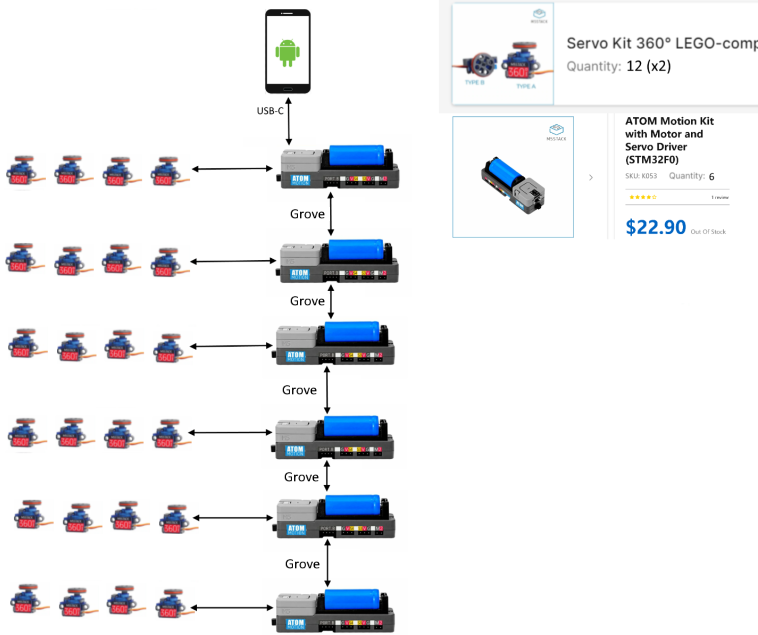
@Arno thats good to know ;D i imagined one could wire the ATOM and SERVO2s together anyway to pipe the signals. But having a CORE seems fine too so here is the new setup:

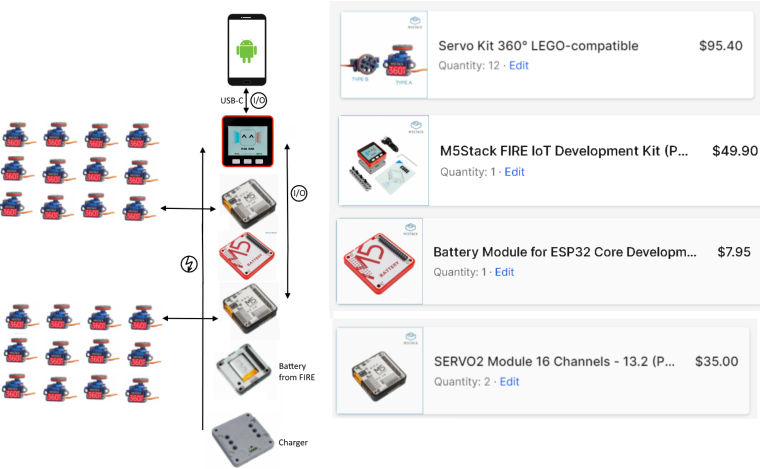
its great that the FIRE does have a Battery-Bottom already and i assume this is a very basic setup now. maybe it would be more straight forward to make a single stack but making two interconnected stacks like in the image is surely possible.
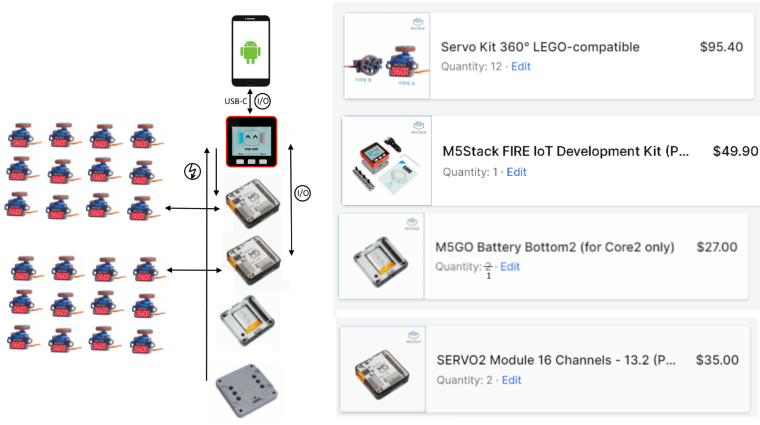
Maybe removing the Battery-Modules and get the power right instead. (Though i really like the magnetic charging-connector ;)