Connecting multi TOF4m units via PA.hub - weird behaviour
-
Hello @sqbaczek
assuming the programming is correct my best guess would be that the two ToF4m influence each other due to the signal they both send out. Maybe the signal of one gets reflected from the walls and then is picked up by both (and vice versa)?
BTW: have you tried the UIFlow2 instead? Do you get the same results?
Thanks
Felix -
Greetings @felmue!
Thank you for your reply,
Even if I space apart both sensors and direct them in different spots - they still get weird readings. As soon as I disconnect one of them from pa.hub one label gets proper readings - and other gets very simillar reading to first label (even though it is linked with disconnected sensor).
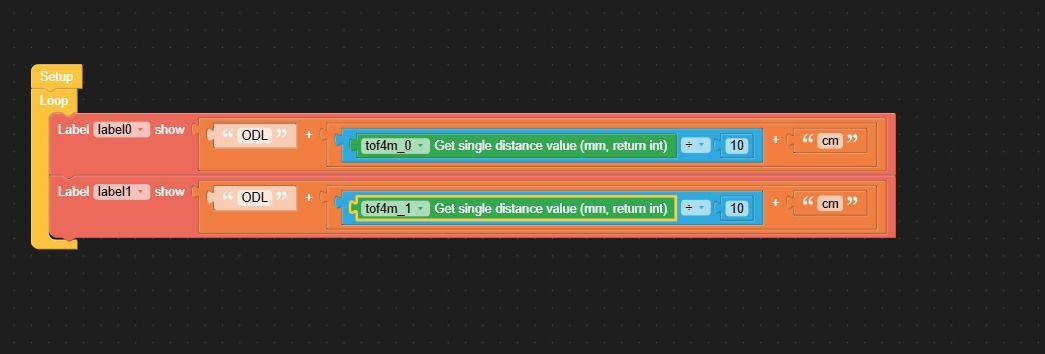
Below screenshot of readings with one sensor disconnected from pa.hub - and both labels change as soon as I get some object near the connected sensor.
For UIflow 1 code is:
from m5stack import * from m5ui import * from uiflow import * import time import unit setScreenColor(0x222222) tof4m_0 = unit.get(unit.TOF4M, unit.PAHUB0) tof4m_1 = unit.get(unit.TOF4M, unit.PAHUB2) label0 = M5TextBox(43, 36, "label0", lcd.FONT_Default, 0xFFFFFF, rotate=0) label1 = M5TextBox(45, 88, "label1", lcd.FONT_Default, 0xFFFFFF, rotate=0) while True: label0.setText(str((str('odl 1 ') + str(((str(((tof4m_0.get_single_distance_value) / 10)) + str('cm'))))))) label1.setText(str((str('odl 2 ') + str(((str(((tof4m_1.get_single_distance_value) / 10)) + str('cm'))))))) wait_ms(500) wait_ms(2)When I try to run it on UIflow 2.0 with pa.hub I get error:
Traceback (most recent call last):
File "<stdin>", line 29, in <module>
File "<stdin>", line 20, in setup
File "driver/vl53l1x.py", line 60, in init
File "driver/vl53l1x.py", line 176, in get_model_info
File "driver/vl53l1x.py", line 273, in _read_register
TypeError: unexpected keyword argument 'addrsize'This is my code for uiflow 2 - and it does not work
import os, sys, io import M5 from M5 import * from hardware import * from unit import TOF4MUnit from unit import PAHUBUnit label0 = None label1 = None i2c1 = None pahub_0 = None tof4m_2 = None tof4m_0 = None def setup(): global label0, label1, i2c1, pahub_0, tof4m_2, tof4m_0 M5.begin() Widgets.fillScreen(0x222222) label0 = Widgets.Label("label0", 44, 65, 1.0, 0xffffff, 0x222222, Widgets.FONTS.DejaVu18) label1 = Widgets.Label("label1", 43, 111, 1.0, 0xffffff, 0x222222, Widgets.FONTS.DejaVu18) i2c1 = I2C(1, scl=Pin(22), sda=Pin(21), freq=100000) tof4m_0 = TOF4MUnit(PAHUBUnit(i2c=i2c1, channel=1), 0x29) tof4m_2 = TOF4MUnit(PAHUBUnit(i2c=i2c1, channel=0), 0x29) def loop(): global label0, label1, i2c1, pahub_0, tof4m_2, tof4m_0 M5.update() label0.setText(str((str('Odl1 ') + str((tof4m_2.get_distance))))) label0.setText(str((str('Odl2 ') + str((tof4m_0.get_distance))))) if __name__ == '__main__': try: setup() while True: loop() except (Exception, KeyboardInterrupt) as e: try: from utility import print_error_msg print_error_msg(e) except ImportError: print("please update to latest firmware")Thank you for help,
best,
Matt -
Hello @sqbaczek
unfortunately I don't have the proper hardware, e.g. TOF4m unit, so I cannot test this myself. Sorry.
BTW: are you aware that in UIFlow1 you use PaHUB channel 0 and 2 and in UIFlow2 you setup PaHUB channel 0 and 1.
Thanks
Felix -
Hi @felmue,
thanks for response - yes I have tried different ports on PA.hub so between two uiflows sensors might have different port values.best,
-
@sqbaczek
I think this might be some weird hardware problem, like a damaged component in the PaHUB causing the transmitted information to be incorrect... etc. Maybe the best way is to find a working one to test it. -
Greetings everyone! I have very similar error as @sqbaczek when running 1 ToF4M via PaHUB2 with CoreS3 and also Cardputer on UIflow 2.0. The ToF4M works fine when directly connected to the I2C port of either CoreS3 or Cardputer. It appears that ToF4M cannot be initiated when connected via PaHUB2 on UIflow 2.0.
Below is the error I get with CoreS3 when on UIflow 2.0:
Traceback (most recent call last): File "<stdin>", line 24, in <module> File "<stdin>", line 17, in setup File "driver/vl53l1x.py", line 60, in __init__ File "driver/vl53l1x.py", line 176, in get_model_info File "driver/vl53l1x.py", line 273, in _read_register TypeError: unexpected keyword argument 'addrsize'Below is my code on UIflow 2.0:
import os, sys, io import M5 from M5 import * from hardware import * from unit import TOF4MUnit from unit import PAHUBUnit label0 = None i2c0 = None pahub_0 = None tof4m_0 = None def setup(): global label0, i2c0, pahub_0, tof4m_0 M5.begin() Widgets.fillScreen(0x222222) label0 = Widgets.Label("label0", 0, 0, 1.0, 0xffffff, 0x222222, Widgets.FONTS.DejaVu18) i2c0 = I2C(0, scl=Pin(1), sda=Pin(2), freq=100000) tof4m_0 = TOF4MUnit(PAHUBUnit(i2c=i2c0, channel=0), 0x29) def loop(): global label0, i2c0, pahub_0, tof4m_0 M5.update() label0.setText(str(tof4m_0.get_distance)) if __name__ == '__main__': try: setup() while True: loop() except (Exception, KeyboardInterrupt) as e: try: from utility import print_error_msg print_error_msg(e) except ImportError: print("please update to latest firmware")I tested other units via PaHUB2 with CoreS3 on UIflow 2.0. These include Gesture Unit, 8Servos Unit, ENV Pro Unit, EXT.IO2 Unit. They all appear to work fine, at least not showing any initiation error.
-
Hello,
My first post here. Came across this thread googling.
I can recreate this problem, it has been driving me crazy. I have tried 2 different PAHubs to ensure that isn't the issue. Can confirm the same issue arises with both. I bought the PAHub as it claimed it could handle 2 devices with the same I2C address across different ports, but something strange is occurring.

I have ToF4m sensors affixed 90 deg to each other, and attached to port A of a Core2 via the PAHub.
Either ToF4m works fine when it is the only unit connected to the Core2.
When both are connected via the PAHub, the results seem to interfere with each other. Particularly, a zero reading on one sensor always leads to a zero on the other. Also, the readings go from being stable and consistent to very noisy indeed - errors of up to 1m. I do not believe this is a laser intereference issue as if I cover one sensor, and point the other to clear air with no object for 3m, I still get a reading of 0 from both sensors.
I am also unable to initiate ToF4M when connected via PaHUB2 on UIflow 2.0, and have had to revert to 1.0 to perform these tests.
This has cost me a lot of time, and sadly I am unable to offer a solution at this time but I watch this thread with interest.
Edit to add:
If I remove one of the ToF4M modules whilst the program is running, both labels continue to update with results, further leading me to believe this is an address collision issue rather than a laser interference issue.
-
Hi guys
BTW: TOF4m allows to change its I2C address (using
set I2C addressblock in UIFlow2) so you could change the I2C address of one TOF4m, then connect both using a passive hub. This would take PaHub out of the equation.Thanks
Felix -
@felmue Tried this. I could not get the address change to 'stick' after a power cycle, but perhaps I'm missing something. I did this using UIFlow2.
-
Hello @SB12345
ok, I see, hmm.
Have you tried to connect one TOF4m to port A and the other to port C and then setup two I2C busses?
Thanks
Felix -
Indeed yes, I get a port address error. I have a Core 2.
-
-
I have the same issue.
I tried to only connect only ONE TOF4m to PA.HUB 2.1 then Port A.
I got " unexpected arguement 'addrsize' " when I init TOF4M
but if i change TOF4M to TOF, it works fine(the init funtion of TOF, not 4M version, has no argument, i.e. just init() )
-
@Elliptic3612 @matthewchan @SB12345 @sqbaczek
We have fixed this problem, please wait for the next version of UiFlow2 firmware
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login