Servos for S3 in uiflow2
-
Hi
Where can I select a Servo in uiflow2 with a S3?
I have a high torque servo MG996R and a grove to servo adapter.
In some tutorials they can easely choose a servor from the menu!?
Thanks -
Hi @Schorsch,
[UIFlow2 environment assumed CoreS3]
In the original UIFlow there was the following under Advanced > Pin Servo
https://docs.m5stack.com/en/uiflow/advanced/pinHowever, in UIFlow2 I can't seem to locate the same. Under Software there is the MQTT and other stuff from Avanced. And I couldn't see it under Hardware either, but there is PWM to directly control pin outputs, which might be an option, if you can confirm the servo values.

An alternative thought, switch to Python window in UIFlow2, add equivalent lines from UIFlow and see if the Servo library and function can still be called outside of Blocky
e.g.
from servo import Servoservo0 = Servo(26,50,500,2500,180)
servo0.write_angle(90)
servo0.write_us(1500) -
I think I found it under the hardware icons as in or PEM
-
Hi @gavin67890
I also can not find the RFIDs...
My servo is behind a PaHub on Channel1!
I found a similar project, but directly in phyton, no uiflow2:
https://www.hackster.io/386917/3-in-1-sanitiser-dispenser-d18432 -
Hi @Schorsch,
Hmm, that's a little frustrating on the RFID front. I can only assume it's in progress with M5Stack for release (I couldn't see it either in UIFlow2).
I had a look at the Hackster project, and I think they've been a little tricky with the hub implementation. If you look closely at the images the hub appears to be the 1-to-3 Hub (which operates differently to either the PaHUB or PbHUB).
I think they have connected the Servo and PIR to the hub Groove connector:
Pin 1/White input from PIR (Pin 2/Yellow not used)
Pin 2/Yellow output to Servo (no Pin1/White)
5V and GND in parallel. Connected to GPIO Port B (Black) on Core.
Then they've gone for the PaHUB (PortA-Hub) I2C (Red) to connect the other sensors.I don't think you will be able to daisy chain your Servo via the PaHUB because it is I2C not GPIO. The good news is the CoreS3 has more ports to play with. Looking at the very tiny image on the CoreS3 documentation, I think Port B GPIO (Black) I/O is on G8/G9 respectively i.e. connect output/G9 to the control line of your servo.
Port Pin NOTE
PORT-A(RED) G2/G1 I2C
PORT-B(BLACK) G9/G8 GPIO
PORT-C(BLUE) G18/G17 UART(RX/TX)It might be worth a try with your servo connected to Port B GPIO (Black) then introduce the other hardware.
G8/I (White) --> Not connected
G9/O (Yellow) --> Servo control
Red--> Red
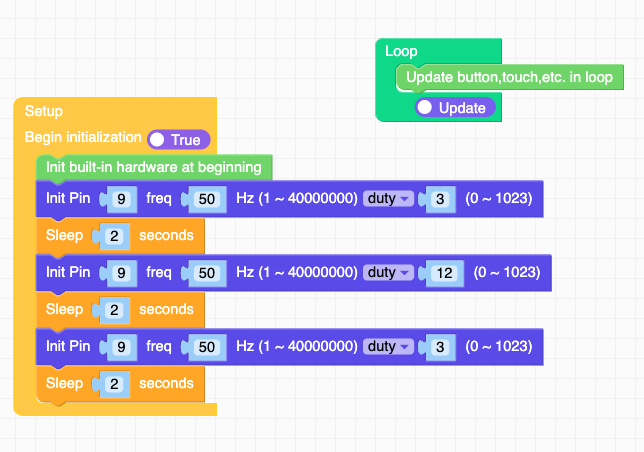
Black --> BlackAnd then try the PWM blocks in UIFlow2 Blocky with some pauses in between. I don't know what the duty and frequency will be for your servo, so I've shown values copied from the Hackster example.
Shout back if you can at least get some movement out of it. Best of luck.
-
@gavin67890
Thanks for your time. I will try different stuff. But it seems to be not yet implemented in uiFlow2! -
The "problem" is, that I really need a 360 servo. To open something by different sensor. It doesnt matter wich one, I like to play with them and sketching my ideas. But without a servo, nothing make sense...
So please, dear UiFlow2-Alpha developers, Vers. 27 hopefully includes the servos!
;-) -
Are there any news according Servo support?
I still do not find any way of support (Pin servo or module).
It's been over an year now and should be an easy task to support it in UiFlow.
Did anybody find a solution to control 180° / 360° servos with UiFlow 2? -
I'm looking for it too. Unfortunately, I can't find anything about it anywhere.
-
@m5stack any updates on servo blocks for uiflow2.0. If they aren’t going to made available what is the suggested way to program the core s3 to use blocks to rotate the M5stack 9g servos available at the m5store to specific angles.
-
Hi guys
please find an M5CoreS3 example in UIFlow2 Project Zone controlling a servo. It's named: M5CoreS3_Servo_Example_UIFlow2.2.2
Thanks
Felix -
@felmue thanks I will check it out and make better use of the project zone as a how to learning aid.
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login