Issue in sending roll angle to Azure IoT Hub
-
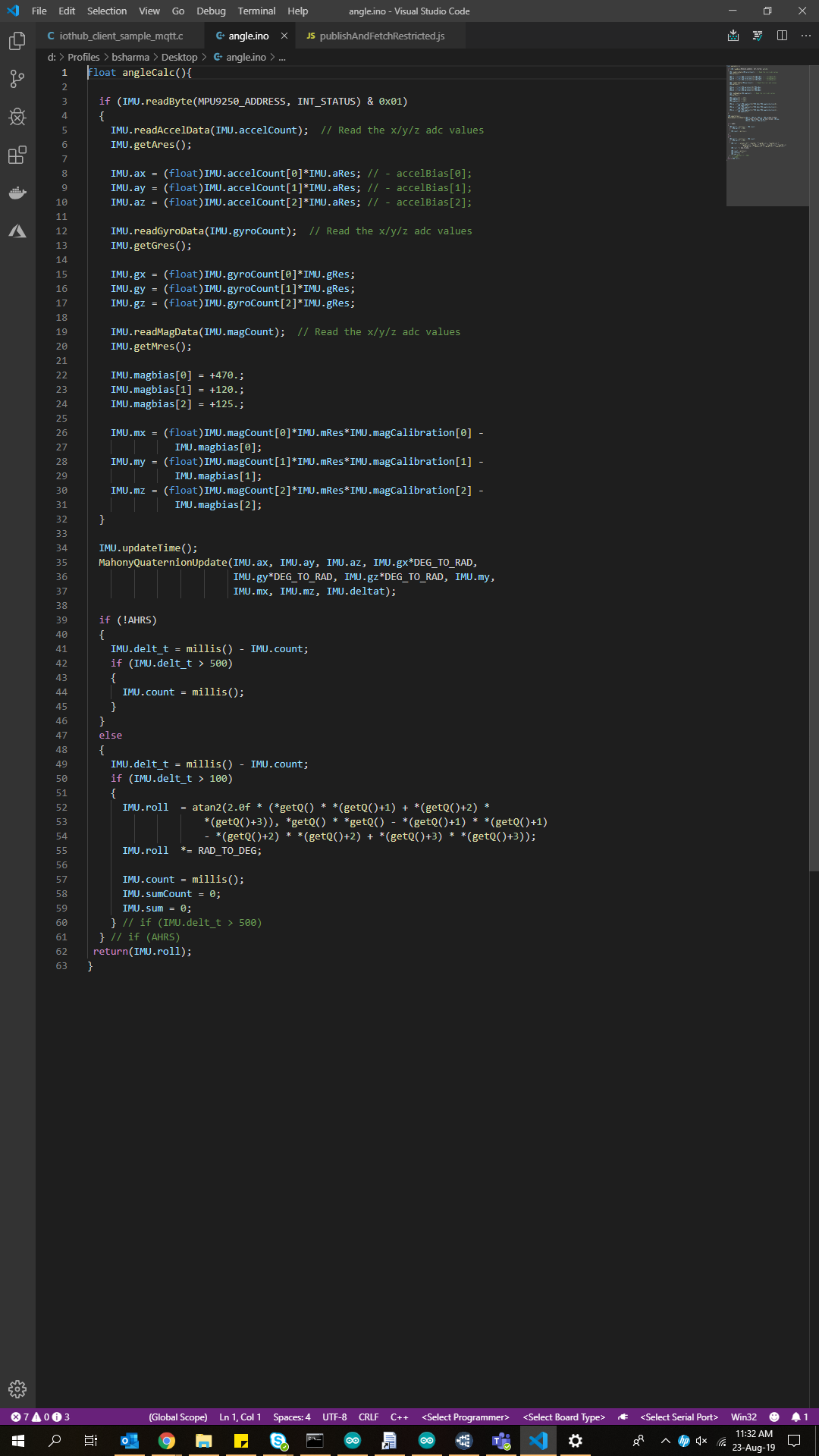
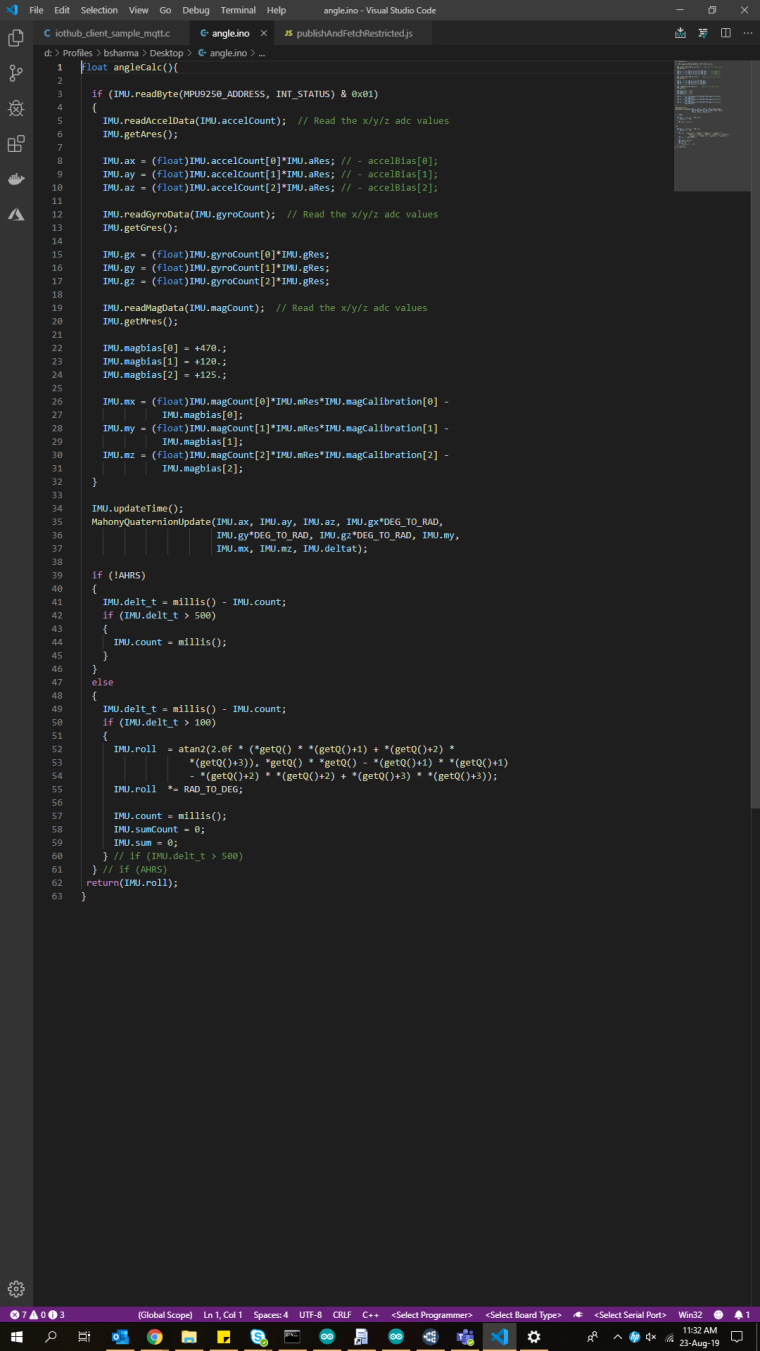
When I am trying to capture roll angle using M5stack Gray it is working fine and separate code for sending data to Azure IoT Hub is also working fine. But when I try to club the two modules the roll angle return by module get highly unstable and it throws random absurd values.
-
Hi, did you solve this? Sounds like a scope, or casting issue.
I'm having a different problem with the IMU and I can see you have a IMU class with Gyro, Accel and Mag data incorporated. Is it for the MPU6886 + BMM150 sensors.
Would you be happy to let me have a look at :
- IMU class .h & .cpp files.
- MahonyAHRS.h & .cpp files.
I'm fighting with the MahonyAHRSUpdate I'm using. The calculations are diverging to NaN after just 2-3 calls and I'd like to compare your code to mine.
Thanks!
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login