@iorex I’ve had partial success using the Roller485 with the pwrCan module. Your setup looks similar to mine, except I’m using a Core3, so my pin numbers are different.
First, check whether your motor is in RS485 mode. The screen on the back should show COM: 485.
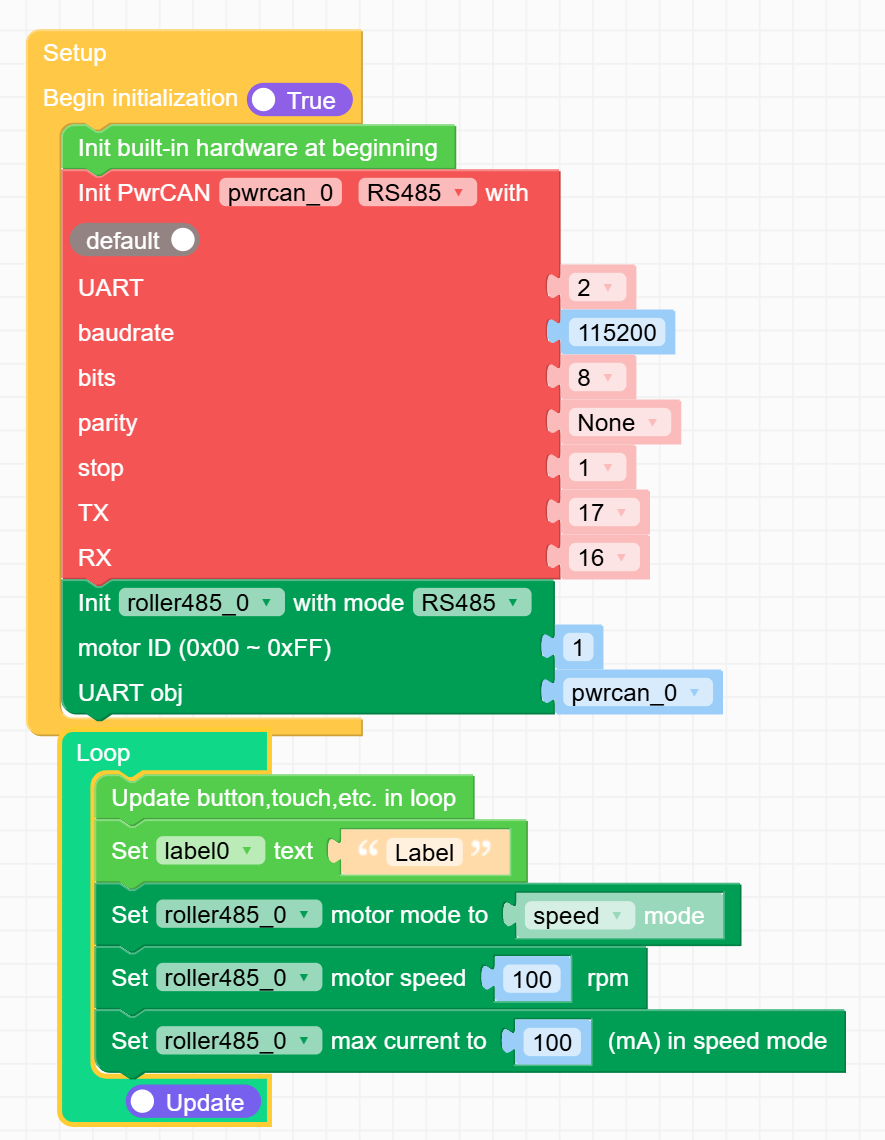
Second, make sure the motor ID is set to 1. The third line on the motor screen should read ID: 0x01.
Lastly, confirm that the motor’s baud rate is 115200 (this is the default).
If all of the above is correct, you can move on to the pwrCan module. Did you flip the resistor for RS485 to the ON position? Are the DIP switches configured correctly?
I was able to control motor speed over RS485, but I still get the error: “Unexpected response length: 32, expected: 17.” It looks like there’s a communication issue from the motor back to the pwrCan module.
As an alternative, you can power the motor using the power pins on the RS485 terminal and send commands via I²C. It requires more wiring, but it works with much less hassle.