ATOMFLY Community Project Collection: How to fly the ATOMFLY?
-
@roboticbits take care of your safety first. Initially I also got a hit from props on my finger since then I tied it to a stick: https://twitter.com/knaveen/status/1293777343341711360
I will try to use a breadboard if it works.
-
@yokonav thanks, following your idea I'm also using sticks now.
-
I did some more tests and analysis of the noise and have some updates.
I re-wrote getAttitude() function and MPU6886 reading seem to have improved. I have a bunch of more sample data and analysis in noise_data folder (in github).
I decided to cross check the noise by adding an external 6 axis IMU. Yes you read that right, I added a MPU6050 on the back of the atomfly base, using same I2C pins (25 and 21).
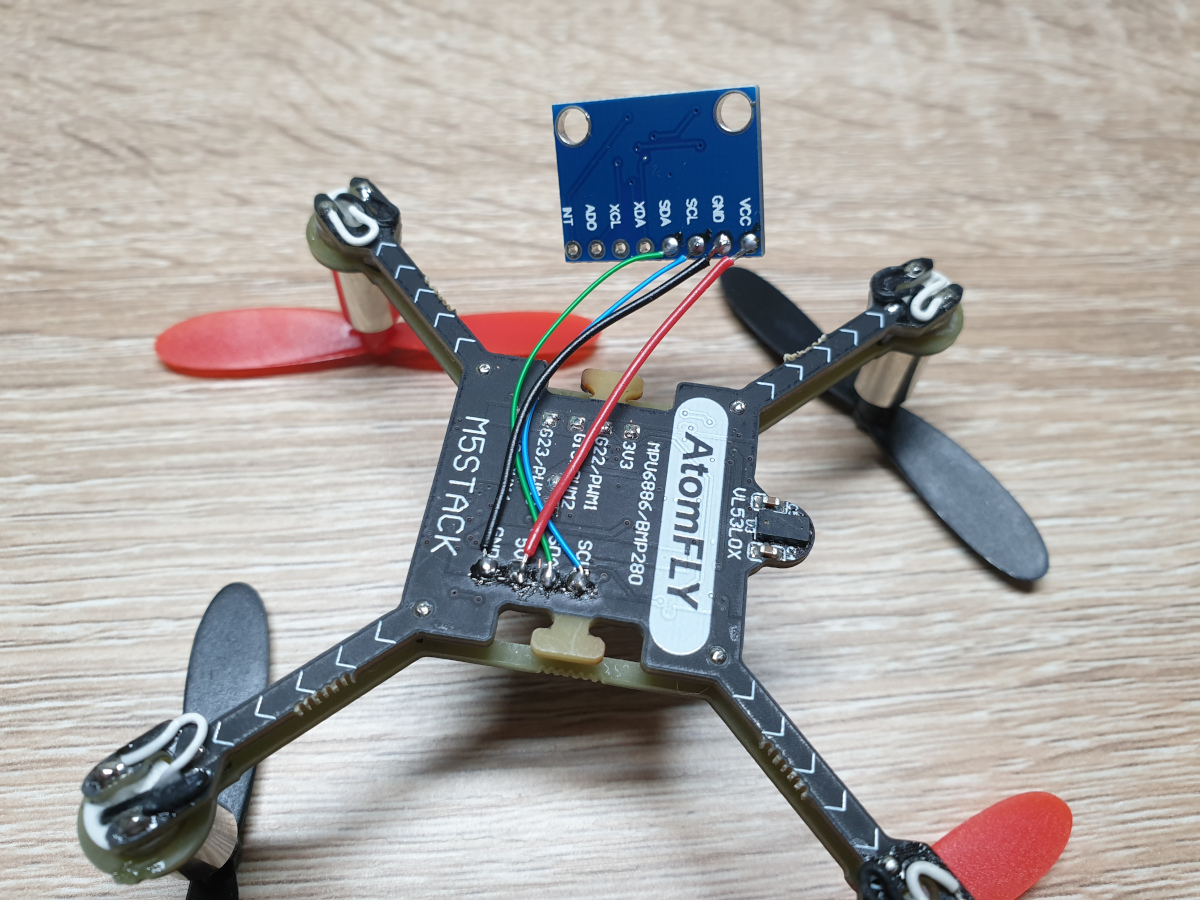
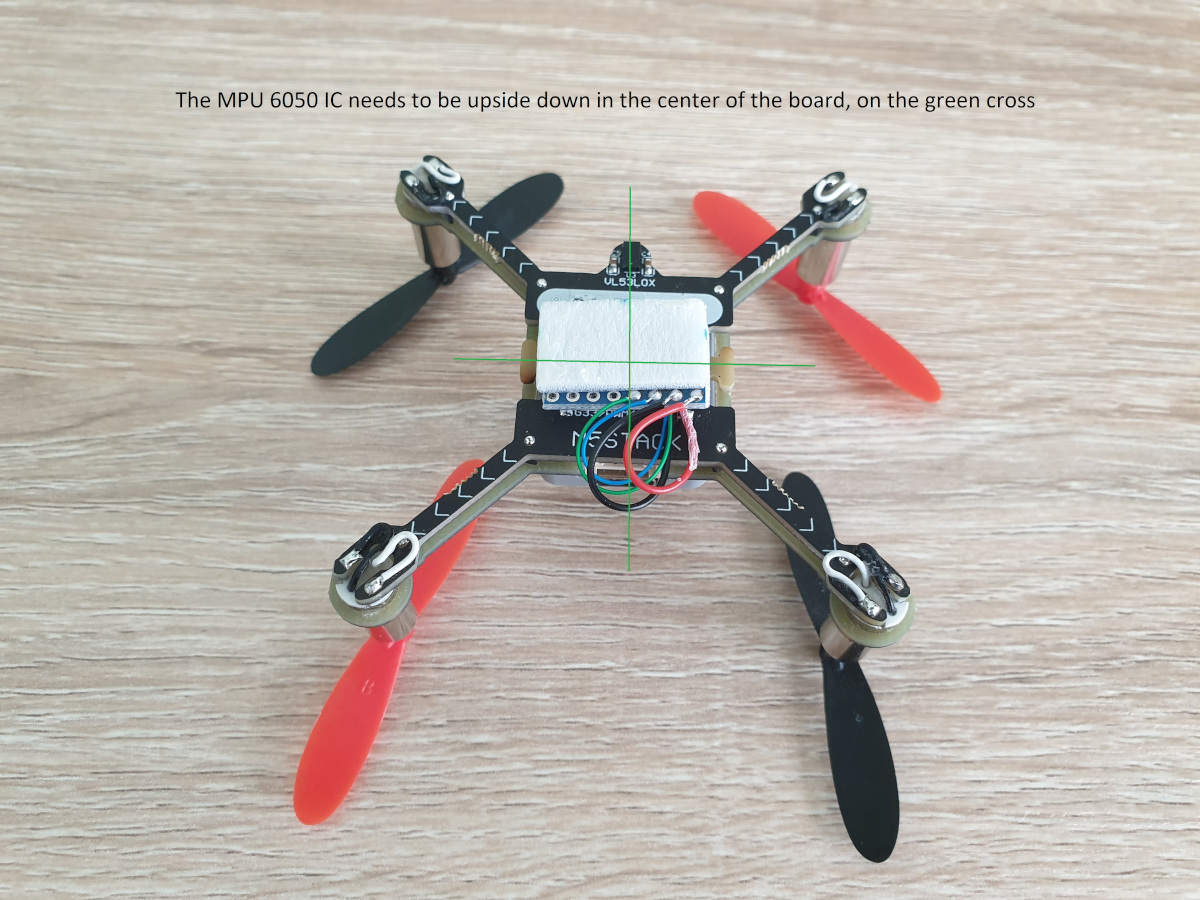
Then I read both of the external and internal IMUs and compared them. The intial reading shows the external IMU is actually picking up more noise (when motors running)! So it seems the internal IMU will be more useful.
My github: https://github.com/kaisarh/atomfly
Anybody wants to share any progress/update?
-
I am waiting for a 100uF capacitor to be delivered. It is difficult to get parts easily in this COVID19 situation. Although I have a 22uF capacitor but I do not know if it would be helpful in preventing voltage drop. My progress is blocking for now.
-
@roboticbits Do you calibrate the IMU?
-
@yokonav I have tried calibration but didn't use in the last tests. In terms of reducing noise, it didn't make a big difference in my tests. Also, the yaw calculation/readings didn't quite work yet, needs fixing.
-
Are you use any movement filters?
I am having trouble trying to work out how to take 10 readings from the IMU and work out an average value to pass to the next block of code In UIFlow -
Sorry I didn't use UIFlow for this. If you want to try Arduino (C++), the file and line below shows how to average IMU data:
https://github.com/kaisarh/atomfly/blob/master/AtomFly.cpp
line 248:
#if 0 //<< change this to 1 to enable averaging
const int ACC_AVG = 5; //<< change this to number reads to average -
Also, UIFlow would be slower.
-
I made some progress on the control side.
I have a testing android app that communicate with the atom fly through Bluetooth.
It's basic and only to test, now I need some true PID on the motors before writing a fly control app
All code is available as usual : https://gitlab.com/TitiMoby/atomflychallenge -
hi guys, has anyone managed to program our dear little drone? ^^
-
I could fly my AtomFly recently as an R/C drone. It was designed to be operated by manual control via Wi-Fi to feed the target values of the pitch and the roll angles, as well as the throttle.
Here is a movie clip: https://twitter.com/qzy13700/status/1395989205440897024
Only the IMU sensor was used for the feedback control to keep the drone's posture. (ToF and pressure sensors not yet used).I used the MahonyAHRS function for posture estimation from the IMU sensors. This is the same approach as the one done by the AtomFly product example code on GitHub.
One interesting thing I found about it in the past was that, the MahonyAHRSupdateIMU function has a hard-coded constant that specifies the sampling frequency of the sensor, which affects the behavior of the filter.
https://github.com/m5stack/M5Stack/blob/master/src/utility/MahonyAHRS.cpp
Therefore this part may need to be changed in the actual projects to match with the actual processing loop frequency, or otherwise the filtered pose estimation could become something not desirable. -
I would really like to engage in this project, only the ATOMFLY kit is EOL and not buyable anymore.
Is there someone who wants to sell his kit or knows a place to buy one? -
@t66 I wan't one but now that we can control a DJI mini drone, they are so much nicer to control then the atomfly.
-
 K kuriko unpinned this topic on
K kuriko unpinned this topic on
Hello! It looks like you're interested in this conversation, but you don't have an account yet.
Getting fed up of having to scroll through the same posts each visit? When you register for an account, you'll always come back to exactly where you were before, and choose to be notified of new replies (either via email, or push notification). You'll also be able to save bookmarks and upvote posts to show your appreciation to other community members.
With your input, this post could be even better 💗
Register Login